Thus far, we have seen that many legal rules consist of general standards and thus generate some level of uncertainty. But is it possible to model this legal uncertainty or rule uncertainty in any formal or mathematical sense? In an excellent forthcoming paper titled “Probabilistic Compliance,” to be published in the Yale Journal on Regulation, Alex Raskolnikov, presents a probabilistic model of compliance. Raskolnikov is a professor of tax law at Columbia University, so he knows what he is talking about, and since his paper is one of the most intriguing works we have read on this subject, we shall summarize it here in some detail.
To begin with, his model has just five fundamental building blocks: x, C, b, F, and G.
- x is the level of compliance chosen by a regulated actor. In other words, when the law is uncertain, an actor in Raskolnikov’s model must decide how much time and resources to invest in its compliance efforts.
- C is the cost of figuring out and complying with an uncertain legal standard.
- b is the benefit from complying with the law, i.e. whatever penalty is avoided by complying with the law.
- F is the probability of obtaining this benefit. F is probabilistic precisely because the law is uncertain and the amount of compliance, variable. There is no guarantee that x compliance level will actually result in compliance.
- G is the actor’s expected gain, i.e. expected benefits minus expected costs.
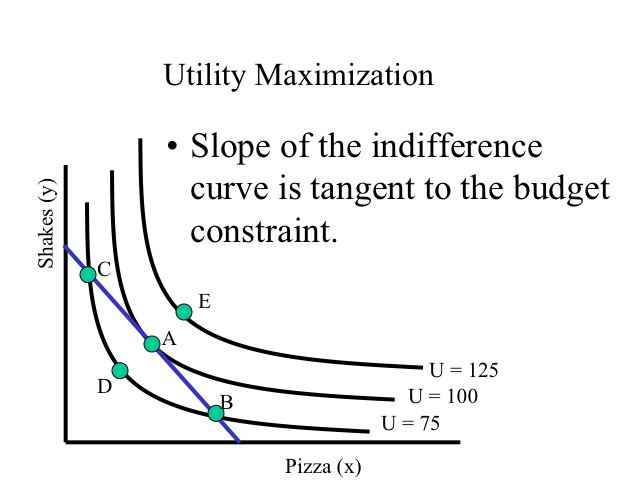
Now, here is Raskolnikov’s model: G(x) = bF(x) minus C(x). What we love about this simple model is that G, F, and C are all a function of x, the actor’s compliance effort. In other words, F is a function of x because the greater an actor’s compliance efforts, the more likely he will be found in compliance. Likewise, C, the cost of compliance, is also a function of x, since stronger compliance positions generally cost more time and resources than weaker compliance positions. And lastly, because compliance is costly and because the level of compliance is variable, the expected gain of compliance is a function of x.
Another thing we love about Raskolnikov’s model is that it makes no reference to “social welfare.” Previous models of legal uncertainty generally assume there is some mythic and socially optimal set of legal rules (or some socially-optimal enforcement regime), but beyond crude guesswork, the social benefits and social costs of most legal rules (especially uncertain ones) are in reality almost always impossible to deduce or infer in any meaningful sense. For his part, Raskolnikov drops the social-optimality assumption altogether. Instead, his model attempts to figure out the optimal amount of compliance from an actor’s private or subjective point of view.
But as much as we love Raskolnikov’s simple model of probabilistic compliance, there are (alas) several serious problems with it. One is that he assumes that “detection and scrutiny are assured” (p. 112). (By the way, this is a problem that plagues previous models of legal uncertainty as well.) This assumption, however, cannot be right, since detection is probabilistic. Why, then, do Raskolnikov and others assume away detection uncertainty?
The other problem with most, if not all, previous models of legal uncertainty (including Raskolnikov’s)–and with previous models of detection uncertainty, for that matter–is that all these models are “maximization” models. That is, these models assume atomistic actors, all of whom are making their maximization calculations individually and in isolation from everyone else. In brief, these maximization models all assume that actors are perfectly interchangeable or perfectly fungible. If the values of each variable in a given maximization model are the same, then an actor will make the same decision, regardless of what other people are doing. But this too cannot be right. In reality, people’s decisions are very much influenced by what other people are doing. (This is why, for example, economists are unable to explain such a simple thing as the act of voting in national elections, which makes absolutely no sense from an economic point of view.)
In sum, we don’t mind it when economists have to posit perfectly rational actors. After all, they have to do this in order to make the mathematics of maximization work. What we do mind is positing perfectly atomistic actors instead of social actors. In the real world, many legal commands are not only uncertain; detection is also uncertain and actors’ compliance efforts are not atomistic but are instead influenced to some degree by the decisions made by other people. Given these truths (or at least axioms), I will present some alternative social models of legal compliance and legal evasion in my next few blog posts.
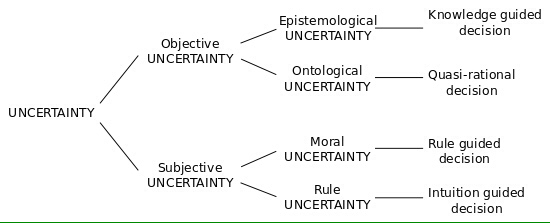
Does anyone really decide like this?


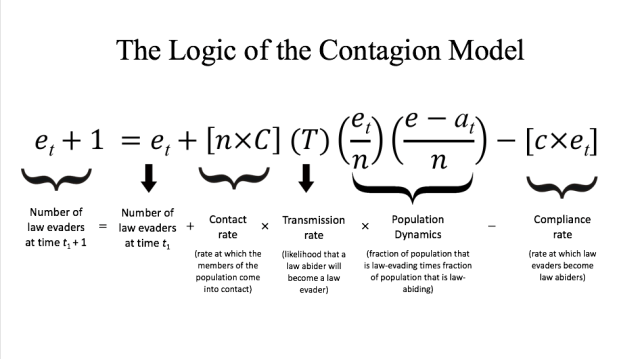 Thankfully, our contagion equation above can be simplified through algebraic manipulation as follows:
Thankfully, our contagion equation above can be simplified through algebraic manipulation as follows:




